【リリース】【電子工作】マイクロマウス
2005/01/01
テーマ: リリース / 電子工作 / 2005 / すべて
マイクロマウスという自律ロボットを大学のサークルで作っていました。
動画
概要
- 3m x 3m の迷路内を自律的に走りゴールするロボットです。
- 迷路は 16 x 16 の正方形の区画に分かれていて、区画が隣接する部分に壁があったりなかったりします。
- スタートは角の区画、ゴールは中央の 4 区画です。
- 壁の有無をセンサーで検知しながら迷路を探索してゴールに向かいます。
- メカ、電子回路、ソフトと 1 人で全部作るのでかなり楽しい!
動画のマウスのスペック
- 2005 東北大会で 3 位(だった気がします)
- 3 台目
- 自分で作った中でデザイン/性能が一番いい
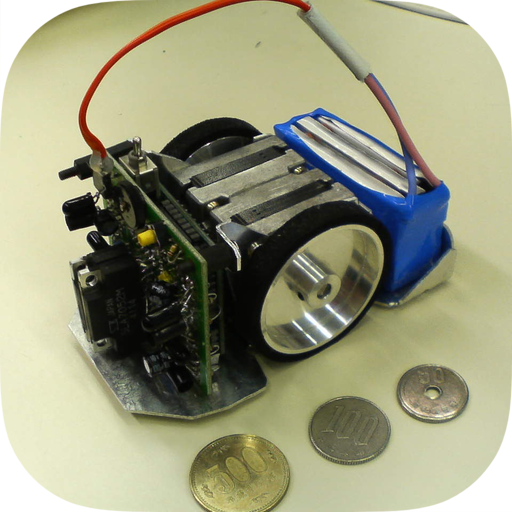
ハードウェアスペック
- SH-2 プロセッサ
- 薄型ステッピングモータ
- リチウムポリマーバッテリー
- 赤外線 LED
- フォトダイオード
- プリント基板 (自分で設計したものを Olimex 社に $50 ほどで製造依頼しました)
- フレームはアルミ板 (糸鋸で切り、手で曲げて作りました。意外となんとかなる)
- UI は LED 4 つとボリューム可変抵抗
- 重さ: 忘れた
- サイズ: 忘れたけど幅 80mm 長さ 120mm くらい?
ソフトウェアスペック
- ノンストップ探索走行
- 姿勢調整システム(後ろに壁があるときは一度バックする)
- A* っぽい探索アルゴリズム
- ジグザグの経路を斜めに直進する斜め走行モード(2 回目以降のタイムアタック走行で有効になる)